

 咨询:1640400212 合作:33527998 VIP群:25152793
咨询:1640400212 合作:33527998 VIP群:25152793 电话:13775238533(7*24小时)
电话:13775238533(7*24小时) 邮箱:maitu@maitu.cc
邮箱:maitu@maitu.cc
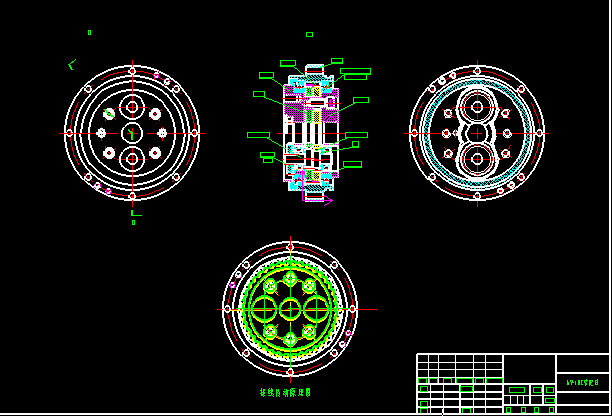
RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。日益受到国内外的广泛关注。RV减速器是由摆线针轮和行星支架组成以其体积小,抗冲击力强,扭矩大,定位精度高,振动小,减速比大等诸多优点被广泛应用于工业机器人,机床,医疗检测设备,卫星接收系统等领域。它较机器人中常用的谐波传动具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低,故世界上许多国家高精度机器人传动多采用RV减速器,因此,该种RV减速器在先进机器人传动中有逐渐取代谐波减速器的发展趋势。
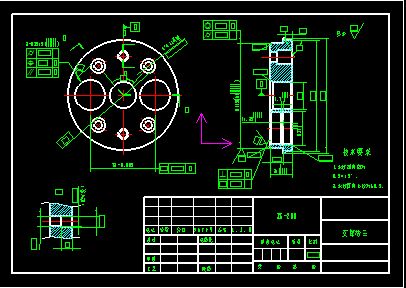
工作原理
RV减速机是2级减速型。
第 1 减速部…正齿轮减速机构
输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。这是第一减速部。
第 2 减速部…差动齿轮减速机构
直齿轮与曲柄轴相连接,变为第二减速部的输入。在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。另外,在外壳内侧仅比RV齿轮数多一个的针齿,以同等的齿距排列。
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。
此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。
这个转动被输出到第2减速部的轴。
将轴固定时,外壳侧成为输出侧
轴转动情况
R :速比值:R=1+(Z2/Z1)*Z4
Z1 :输入齿轮的齿数
Z2 :直齿轮的齿数
Z3 :RV齿轮的齿数
Z 4:针齿根数
国内关于RV减速机研发取得巨大成就,大部分公司的新产品传动精度可以达到30角秒,但普遍存在精度保证期(使用寿命)不长,寿命达不到纳博公司的一半,噪音,温升较高。究期原因,有要材料背锅的,有要热处理背锅的。其实关键还在RV齿的修型及工艺,因为逆向设计的原因,不喜欢优化设计参数。本人研究活齿传动逾30年,跟踪RV减速机逾10年,以实际工况来设计摆线片的运动轨迹方程,优化偏心量的设定,有效减少RV齿的接触应力,使之能够提高使用寿命。所有图纸提供工程图,三维图,工艺及装配文件,标准件供应商联系方式。

